|
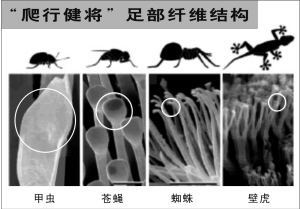
���� ����Ѷ ������ �����ܣ�����ڻ������쿴�˿ƻõ�Ӱ��֩��������һ������λ�������µļһﲻ��ΪȻ����Ϊ�����š������߱ڡ��������Ƕ���ֻ�Ǽҳ��㷹������������й���ѧԺ��Ϥ����Ժ��ѧ�о�����������������ʾ�˱ڻ���������������⡰�ŵװ塱ͬʱʵ�ֿ���𤸽�������˶���ѧ���ƣ��Ȳ��������ܿ��ܡ�
������Ϥ����һ����ԭ�����������ڹ���ѧ������ѧ����������������������з���Ӧ ����������ߵ��ͻ����ˣ�����𤸽���ƿ��ؾ�����ʵָ�����塣
������Ȼ�硰�������桱�������ݻ�������ڶද���ؼ��������˶���ѧ������δ����ȫ��ʾ���ڻ������졢������Ӭ��֩��ȶ�����г�ǿ������������������ˮƽ�����˶����磬�ڴ�ֱ���������������컨����Ҳ�ܿ����ƶ�����ڻ��ġ����̡�����0.04��������𤸽����������������0.06������ȫ�����
�����ڹ�����Ȼ��ѧ����͵¹�����ѧ����ʽ�ѧ��֧���£��п�Ժ��ѧ�����ٻ����о�Ա���������ʴ�ѧ�������ں�����ͨ������ʵ�鷢�֣��������н����ĽŲ��ĵ���й�ͬ���������������조�ŵװ塱����֯�ṹ����һ��⻬�ı���Ĥ�����ڶ����״��ά�ϣ���Щ���иնȵ���ά��ƽ�����У��������Ĥ�γ�һ���ĽǶȺͷ��������ǵ�ÿֻ���ϣ��������ֱ���Ϊ���������ԡ�����άĤ��֯����ϣ�ʹ��������ͣ��ֹʱ����ǿ𤸽��������������ʱ������𤸽����
���������о���Աģ��������Ϣ�������������Σ������˶�ά𤸽�Ӵ�ģ�ͣ����������Ʒ��̣�����𤸽ǿ��Ӱ�졣���շ���3������ƣ����Ÿ������Գ̶��������𤸽ǿ�ȿ��Գ�����С𤸽ǿ�ȸߴ�1�������������������������������ն����ķ���һ��ʱ�����������𤸽ǿ�ȣ�����������һ��ƫ�����������նȵ������𤸽ǿ�Ⱦͼ����С������ʵ���бڻ��˶����һ�£���ʾ�����ද���ڸ����˶�����צƵ��𤸽�������˶���ѧ���ơ�
|