
组图:多足机器人在哈尔滨诞生 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| http://www.sina.com.cn 2005年11月16日11:59 新华网 | |||||||||
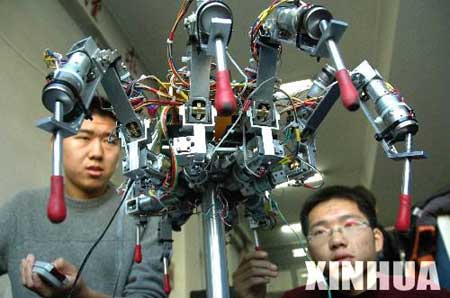 哈尔滨工程大学的技术人员在调试多足机器人 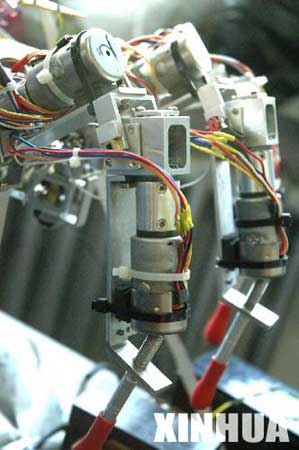 多足机器人可灵活转动的“脚”  多足机器人共动用金属零部件300多个 11月15日,一种模块化多足机器人在哈尔滨工程大学研制成功。据技术人员介绍,该机器人采用仿生学原理,模仿动物神经网络系统进行控制,具有二十四个自由度,可类似人体关节曲伸,通过遥控方式可实现爬行功能。该机器人目前有八只“脚”,还可利用模块拼接的方法增加“脚”的数量。据介绍,该机器人可广泛应用于探险、搜救、火山监测等领域。 新华社发(张清云 摄)
|
| 新浪首页 > 新闻中心 > 国内新闻 > 正文 |
| ||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||


