算丰征途无人车拒止条件定位技术-塑造未来战场的新维度
导言:
在现代战争的版图上,技术的革新不断推动着战术和战略的演变。其中,无人车辆作为军事力量的重要组成部分,其发展和应用受到了极大关注。随着全球定位系统(GPS)/北斗在军事领域的广泛应用,依赖GPS的定位技术已成为常态。然而,在拒止环境——即敌方通过电子战等方式干扰或破坏GPS/北斗信号的战场条件下,传统的定位技术面临巨大挑战。因此,开发拒止条件下的无人车自主全局定位技术成为了引领未来战场新方向的关键。

一、无人车自主全局定位技术的必要性
在拒止环境下,无人车辆无法依赖外部信号进行有效定位,这要求它们必须具备高度的自主性。算丰征途开发的自主全局定位技术使无人车辆能够在没有外部信号支持的情况下,通过内置传感器和算法实现自我定位与导航。算丰征途无人车自主全局定位技术不仅提高了无人车辆的生存能力和作战效率,还为指挥官提供了更多的战术选择。

二、技术原理与实现方式
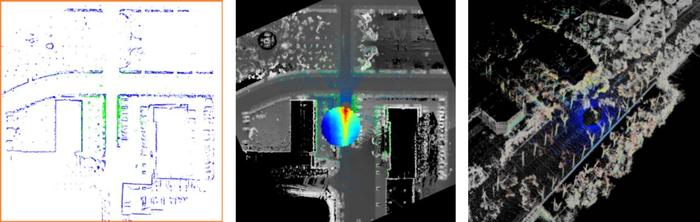
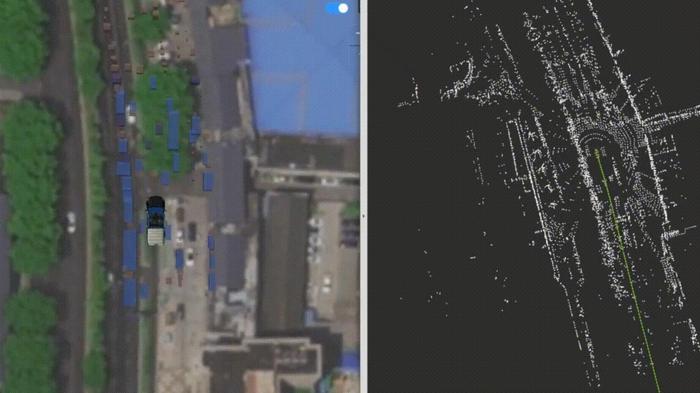
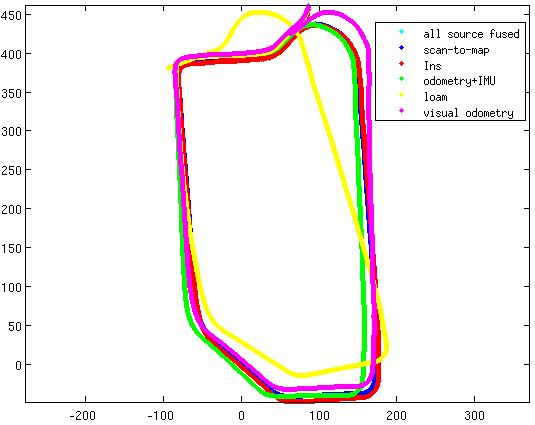
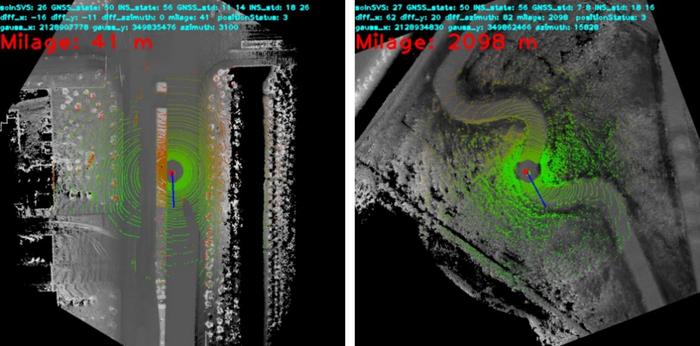
算丰征途无人车自主全局定位技术通常依赖于多种传感器的融合,如惯性测量单元(IMU)、激光雷达(LiDAR)、摄像头和雷达等。这些传感器收集的数据通过复杂的算法进行处理,以构建周围环境的精确三维地图,并在此基础上实现定位。

1. 惯性导航系统:利用加速度计和陀螺仪测量无人车辆的运动状态,通过积分计算得到位置信息。
2. 视觉里程计:通过分析连续的图像帧,追踪特征点来计算无人车辆的相对移动。
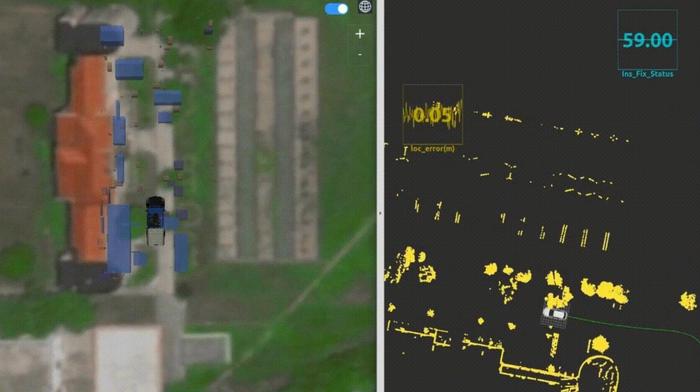
3. 同步定位与地图构建(SLAM):结合多种传感器数据,无人车辆在移动过程中实时构建地图并定位自身位置。
三、算丰征途无人车自主全局定位技术的应用:
1、有人驾驶:在无法依赖卫星导航的情况下,驾驶员可以利用算丰征途无人车自主全局定位技术提供的辅助信息,结合地图和其他传统导航手段,进行路线规划和位置判断。
2、无人驾驶:无人车辆依赖精确的定位系统来执行任务。算丰征途无人车自主全局定位技术可以为无人车提供一种独立的定位手段,即使在卫星信号丢失的环境中,也能保持其导航和任务执行能力。
算丰征途无人车拒止条件定位技术目前处于国内行业前沿,它不仅能够提升战时车辆的生存能力和作战效率,还能在民用领域发挥巨大作用,如灾难救援、偏远地区探索等。
(来源:News快报)