
打造有表情的机器人 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| http://www.sina.com.cn 2006年05月23日19:54 央视《新闻会客厅》 | |||||||||
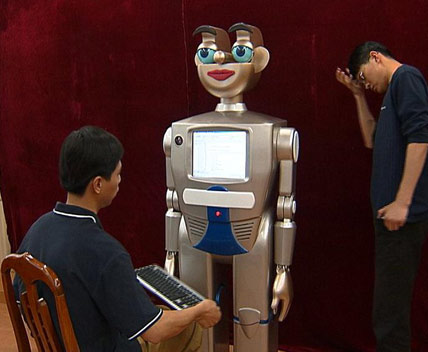 工作人员在调试机器人。 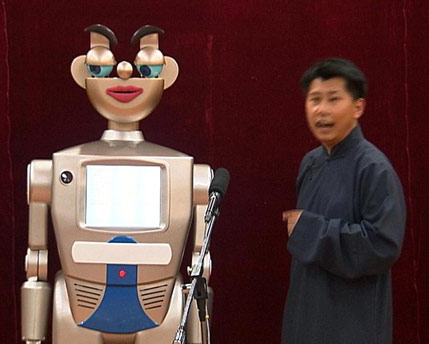 机器人说相声。 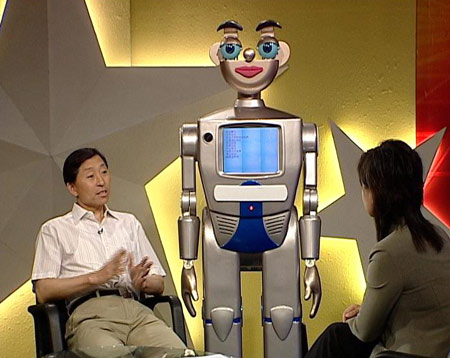 李成荣与机器人。  中国的焊接机器人。 主持人:它用五官的动作组合来表达什么情绪,是你们严格设定好的,就是眉毛要挑到什么位置,眼睛要睁到多大是吗?每一个程序都要设计好? 李成荣:对。 主持人:声音模仿是什么功能?
李成荣:声音模仿就是由机器人模仿各种动物的声音。 主持人:看看,这个现在能展示吗? 李成荣:老虎怎么叫?学绵羊叫。 主持人:像现在我们看到的这个机器人,它在整个机器人的研究发展当中处在一个什么样的水平上呢? 李成荣:机器人的表情分为两类,一类是完全仿真人的表情,一类是卡通型的表情,这是属于卡通型的表情,在卡通型表情,据我们了解,不仅仅是在国内,在国际上也还是没有见到。 主持人:因为机器人这个领域我们太外行了,但是我们想象,它所谓的表情其实就是几个机器构件的活动组合起来就可以了,难在哪儿呢? 李成荣:卡通表情的机器人,它的难点一个是本身的结构,在结构上首先要保证它的每一个表情的器官可以独立进行运动。第二个问题,就是它独立的运动是可控的,因为它的自由度比较多,所以它从控制上要达到某一个我们认为非常合理的表情,它还是需要很好的协调控制。 主持人:如果协调不好,可能会出现什么情况? 李成荣:协调不好可能就四不像了,如果你让它做这个笑,可能笑得很不自然。 主持人:我们看到是很简单的一个笑的样子,但对你们来讲,在程序设计上是要花很多的时间和工夫的。 李成荣:对。 主持人:在你们研究童童的过程中走过什么样的弯路吗?一直都很顺利吗? 李成荣:也不是,头部表情应该是2005年初基本研究出来的,但当时还存在一些问题,比如说像眼球是可以上下左右自由旋转的,在旋转过程中,中间就出现可能眼珠掉下来的情况。经过进一步的研究,我们在2005年5月就突破这个难关,所以它真正是在2005年5月份成功地正式诞生了。 主持人:再往下一步发展应该会是什么样呢? 李成荣:下一步就是使它的表情控制更加精细,更加精细的目的就是为了使它的表情更加让人看着舒服。 主持人:控制人类表情的重要原因是心情决定的,或者说大脑受到外界的刺激,你会有不同的表情做出来,它的表情是谁来决定呢,是事先设计好的程序吗? 李成荣:机器人的表情跟人的表情控制也是类似的,人的表情是由大脑控制的,实际上机器人里边有好几个处理器,相当于它有好几个大脑,在大脑的控制下,通过中枢神经就相当于是机器人的控制信号线,去控制它的各个器官的不同位置变化的组合,就出来了各种各样的表情。 主持人:所以说机器人本身是没有情绪的,可是在这之前人们已经对机器人有像人一样的情感做了很多的设想了,我们通过一个短片来看一下。 在斯皮尔伯格导演的这部电影《人工智能》里,戴维是一个机器人,为了安慰一个因孩子发生事故而遭到沉重打击的母亲,它来到孩子母亲莫尼卡的身边,在外形上戴维与普通的孩子几乎没有任何区别,按照输入的程序,他会笑、会跳、会闹、会搞各种恶作剧,但是由于毕竟是机器,他始终不能和莫尼卡有真正的母子情感交流。 在专家的帮助下,类人机器人戴维被启动了情感程序,戴维最终从没有感情的机器人变成了一个具备“爱”的能力,并且终身都热爱母亲的人类的孩子。 有没有感情是我们通常区别人和机器的界限,然而从许多类似的电影中,这个界限都被最终逾越,而真正在科学领域中,这个可能又是否会真的存在呢? 主持人:我们刚刚看的这部电影应该说是一部科幻片,会不会有一天这已经不再是科学幻想,真的是现实了?还有多远离这一天? 李成荣:机器人情感不仅仅是一个科学问题,同时它是一个社会伦理道德问题,这个都是需要人来控制的,必须人来控制。 主持人:像童童是属于有表情的Z机器人,这个表情是属于智商范围还是情商范围? 李成荣:实际上我们现在的表情应该是预先设置的,所以从本质来讲,还不是像人那样真正意义上的情商。 主持人:从世界范围内来看,像童童这样的有表情的机器人多吗? 李成荣:这也是世界范围内的一个研究的热点,研究的国家很多,比较有代表的就是日本、美国和韩国。 主持人:现在从世界范围来看,研究机器人的重点主要都集中在哪些方面? 李成荣:从技术的角度,主要就是在研究机器人的感知,包括还是听觉和视觉,只有机器人有了视觉,它才可以比较自由地行走,出去以后,它可以感知周围的环境。还有一个就是控制问题,得到感知信息以后,如何通过智能的方法,机器人可以去完成它应该完成的工作。另外,目前研究比较热的就是真正的仿人型双足行走的机器人,也是一个技术问题。从这个研究机器人的种类来讲,应该说范围非常广泛,从教育机器人到娱乐机器人,再到服务机器人,以及各种各样刚才提到的特种机器人,比如说防爆,在特殊环境下管道机器人,这些都是现在研究的热点。 主持人:现在的人类能够研制出来的机器人和刚才我们电影里面看到的那种真的人工智能,有情商机器人,差距有多远? 李成荣:这个差距还是很远的。 主持人:如果是从时间上去说,能差多少年? 李成荣:这个很难说。 主持人:科学家没有过设想吗? 李成荣:没有过设想,机器人的发展,智慧和情感这方面发展,像克隆一样,受到社会伦理道德方面的一些限制。 从1960年世界上第一台机器人在美国问世以来,至今全世界已生产出大约一百万台机器人。 从外形上看,早期大多数机器人并不像人,有的甚至没有一点人的模样,这一点曾经是很多机器人爱好者最感到失望的地方。正因为这样,1973年日本早稻田大学研制出世界上第一个人形机器人成为机器人制造历史上具有纪念碑意义的转折点。 在此之后,日本在机器人研究制造领域继续处于领跑地位,他们在2000年推出了世界上第一个双足行走的机器人;在2003年他们更推出了类人美女机器人。除日本外,近年来,包括韩国、美国在内的世界多个国家的类人机器人研究都有了长足的进步,总体趋势是,从功能到外形,机器人正在越来越接近人类的理想。 与世界发达国家相比,中国在机器人领域的研究起步稍晚,1985年中国的第一台机器人在沈阳诞生,主要从事焊接工作,当时香港报纸评价这个机器人的诞生与中国航天器的研制成功一样意义重大。 进入21世纪后,我国的机器人研究出现了加速发展的势头,2000年11月29日,我国第一台仿人双足机器人“先行者”在长沙首次亮相;2005年中国的第一台有表情的人形机器人童童在中国科学院自动化研究所研制成功;另外,刚刚从有关研究部门传来好消息说,就在最近我国第一台类人美女机器人也即将诞生了。 主持人:类人的美女机器人是什么样的,皮肤、样子就像人一样是吗? 李成荣:我们现在这个月将要推出的是第一代,身体的各个部位都是按照模特小姐做出来的,但是这一款第一代机器人在表情方面相对来讲还是比较简单点,第二代在今年下半年10月份左右推出来以后,重点是在行走,在表情方面,向韩国和日本这方面要靠拢。 主持人:像人类一样的美女机器人,皮肤表面摸上去是柔软的,还是像童童这样的是硬的? 李成荣:它跟童童不一样的,皮肤有比较好的触感,包括服装、发型都是可以替换的。 主持人:到时候童童小朋友就可以有一个漂亮的女同伴了,是吧? 李成荣:对,小妹妹。 主持人:童童,你喜欢想要一个小妹妹吗? 李成荣:我还小,爸爸不让我谈恋爱。 主持人:谁说让你谈恋爱了。如果说仿人型机器人到现在也是三十多年的时间,在这三十多年里面,人类对于研究仿人型机器人的热情是一直持续不断,还是说中间也经历过起伏? 李成荣:也是有一些起伏。 主持人:什么样的起伏? 李成荣:这个就是跟研究人员有关系,跟政府的支持也有关系,像我们国家,实际上也是在80年代就可以研究这个仿人型机器人,在1999年、2000年,第一款、第二款仿人型机器人就出来了,后来有两三年的停顿,这个问题在哪儿?两个原因,第一个,没有后续的经费支持;第二个,对仿人机器人有制约。到底仿人双足行走,整体成本还是很高,目前进口的像日本的八九百万,国产的也是在三四百万,像这样的机器人干什么,当然从学术研究上它是非常有意义的,但是如果没有真正的市场认可和支持,它的发展肯定会中间有一些曲折。 主持人:近两年是一个什么样的趋势? 李成荣:近两年,因为863计划在这方面,从2002年、2003年开始又有了新的支持,相比20世纪初,最近两年的发展要更快一些。 主持人:体现在哪儿?
相关专题:央视《新闻会客厅》 |
| 新浪首页 > 新闻中心 > 国内新闻 > 央视《新闻会客厅》专题 > 正文 |
| |||||||||||||||||||

| |||||||||||||||||||||||||||||||||||||


